近日,课题组研究成果“GLoU-MiT: Lightweight Global-Local Mamba-Guided U-mix transformer for UAV-based pavement crack segmentation”(GLoU-MiT:面向无人机路面裂缝分割的轻量化全局-局部Mamba引导U-Mix Transformer模型)被工程技术领域顶刊Advanced Engineering Informatics接收发表。
该研究针对无人机路面巡检中裂缝分割面临的图像分辨率低、裂缝结构细小及环境噪声干扰等问题,提出了一种轻量级高效的裂缝分割模型GLoU-MiT。模型创新性地融合了U型Mix Transformer特征提取框架、全局-局部Mamba引导跳跃连接机制和边界/语义深度监督模块,能够兼顾局部纹理细节与全局上下文信息提取,在有效降低计算复杂度的同时,提升了裂缝边界检测的精度与语义一致性。实验结果表明,GLoU-MiT在UAV-Crack500、CrackSC和Crack500数据集上均实现了分割精度的提升,并在Jetson Orin Nano等边缘设备上展现出平衡的推理速度与能耗表现,验证了其在复杂边缘环境下的实际应用潜力。未来,研究团队将继续围绕Mamba推理加速与模型轻量化展开深入研究,进一步推动无人机路面病害智能检测技术的发展。
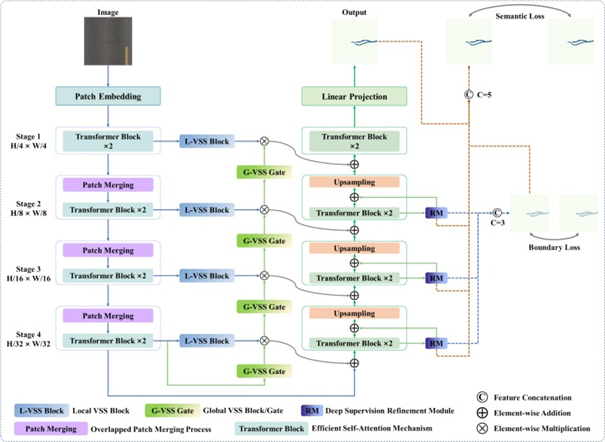
图1 GLoU-MiT模型整体架构图
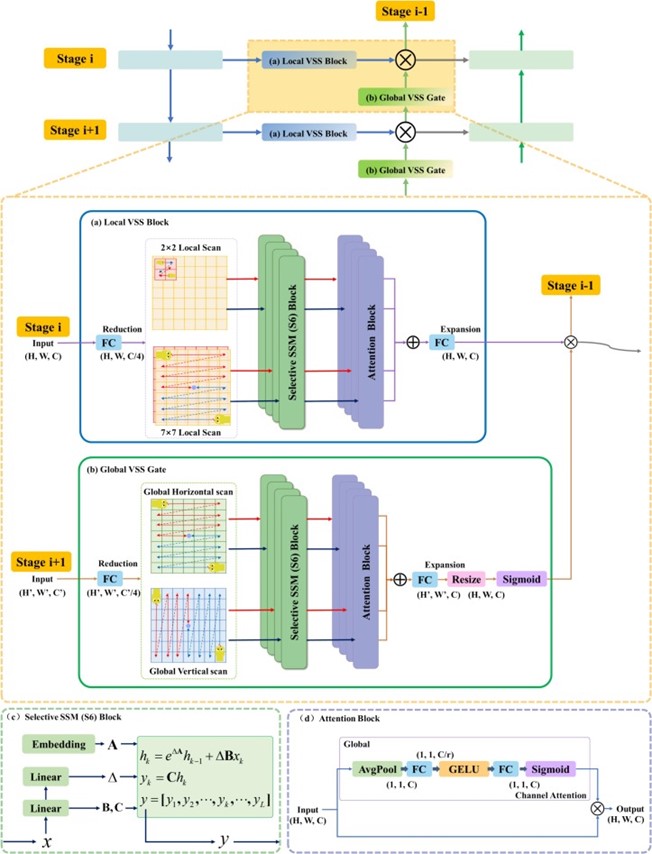
图2 轻量级全局-局部Mamba引导跳跃连接模块
蒋玮教授为论文通讯作者,课题组博士研究生单金焕为论文第一作者,英国利兹大学交通研究所(Institute of Transport Studies)黄跃教授为合作作者。论文链接:https://doi.org/10.1016/j.aei.2025.103384 。
(撰稿:单金焕 审核:张硕 复审:姚腾坤 终审:肖晶晶)
