近日,课题组研究成果“Bridging cross-domain and cross-resolution gaps for UAV-based pavement crack segmentation”(面向无人机路面裂缝分割的跨域与跨分辨率特征对齐方法研究)被智能建造领域顶级期刊Automation in Construction接收发表。
本文针对传统无人机道路裂缝检测方法在跨分辨率与跨领域场景中的泛化能力不足、裂缝精细标注成本高、边界信息难以准确提取等技术瓶颈,创新性地提出了一种融合超分辨率重建、领域自适应与交互式分割的统一裂缝检测框架。该框架在工程需求驱动下实现了三方面创新:(1)构建了具有多分辨率多场景的无人机道路裂缝数据集,适应不同覆盖范围和分辨率的检测需求,支持多场景泛化研究;(2)设计了边界感知向量图及其对应的损失函数,引导模型更加精准地学习裂缝边界特征,并与交互提示深度融合,提升用户交互效率与分割精度;(3)联合引入超分辨率与领域自适应机制,在低分辨率标注数据的基础上提取高质量裂缝特征,实现跨分辨率、跨领域的高效准确分割。本研究在显著降低人工标注成本的同时,有效提升了复杂场景下的裂缝检测精度与实用性,展现出较强的工程应用价值和推广潜力。
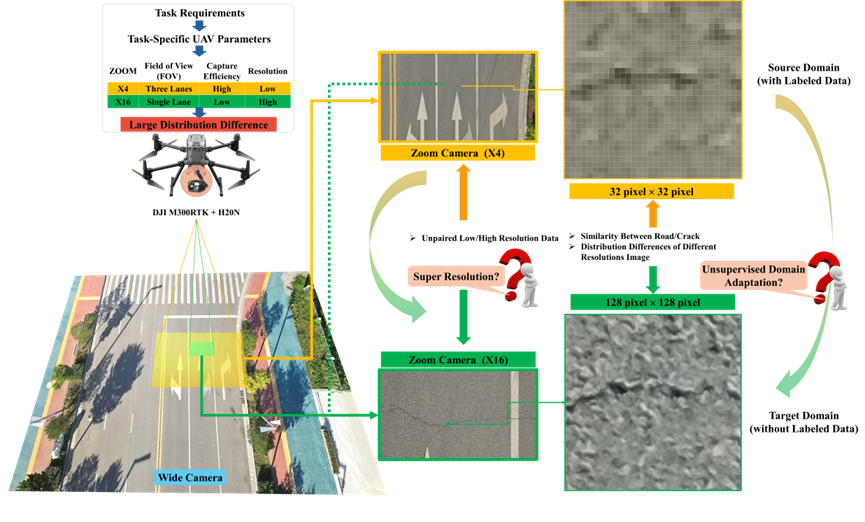
图1 无人机道路裂缝检测中跨域与跨分辨率挑战
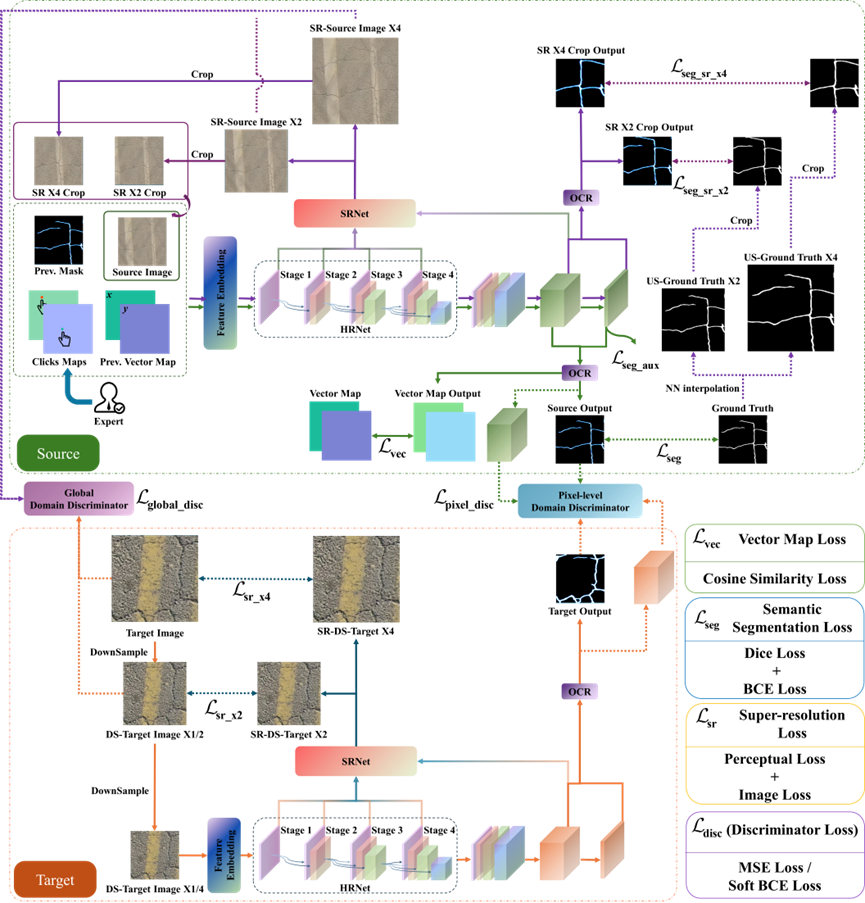
图2 跨域跨分辨率模型整体架构
精细化交互式分割软件演示视频
蒋玮教授为论文通讯作者,课题组博士研究生单金焕为论文第一作者,课题组冯霄老师为合作作者。论文链接:https://doi.org/10.1016/j.autcon.2025.106141。
(撰稿:单金焕 审核:张硕 复审:姚腾坤 终审:肖晶晶)
