近期,课题组研究论文“Unmanned Aerial Vehicle (UAV)-Based Pavement Image Stitching Without Occlusion, Crack Semantic Segmentation, and Quantification”(基于无人机(UAV)的路面无遮挡图像拼接、裂缝语义分割与量化)被智能交通领域国际权威期刊《IEEE Transactions on Intelligent Transportation Systems》接收发表。
该论文针对无人机在道路病害检测中遇到的瓶颈,如车辆遮挡和类别不均衡等,提出了系统的解决方案,构建了一个完整的基于无人机平台的全幅道路病害无遮挡检测系统。首先,提出了历史最佳匹配图像法(Historical Best Matching Image Approach,HBMI)以消除遮挡影响;其次,构建了像素级标注数据集UAV-Crack500,并引入完全不对称损失函数(Completely Asymmetric Loss, CAL),显著提升了裂缝语义分割的精度;最后,基于形态学操作提取了裂缝的形态特征,为后续养护决策提供精准数据支撑。
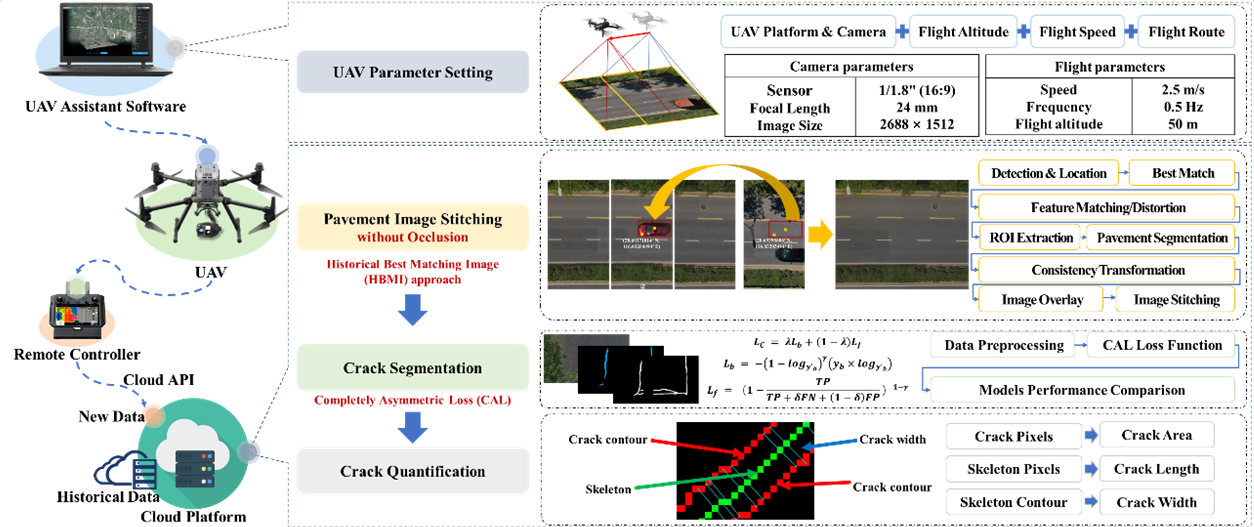
图1. 基于无人机的路面裂缝分割和量化综合系统
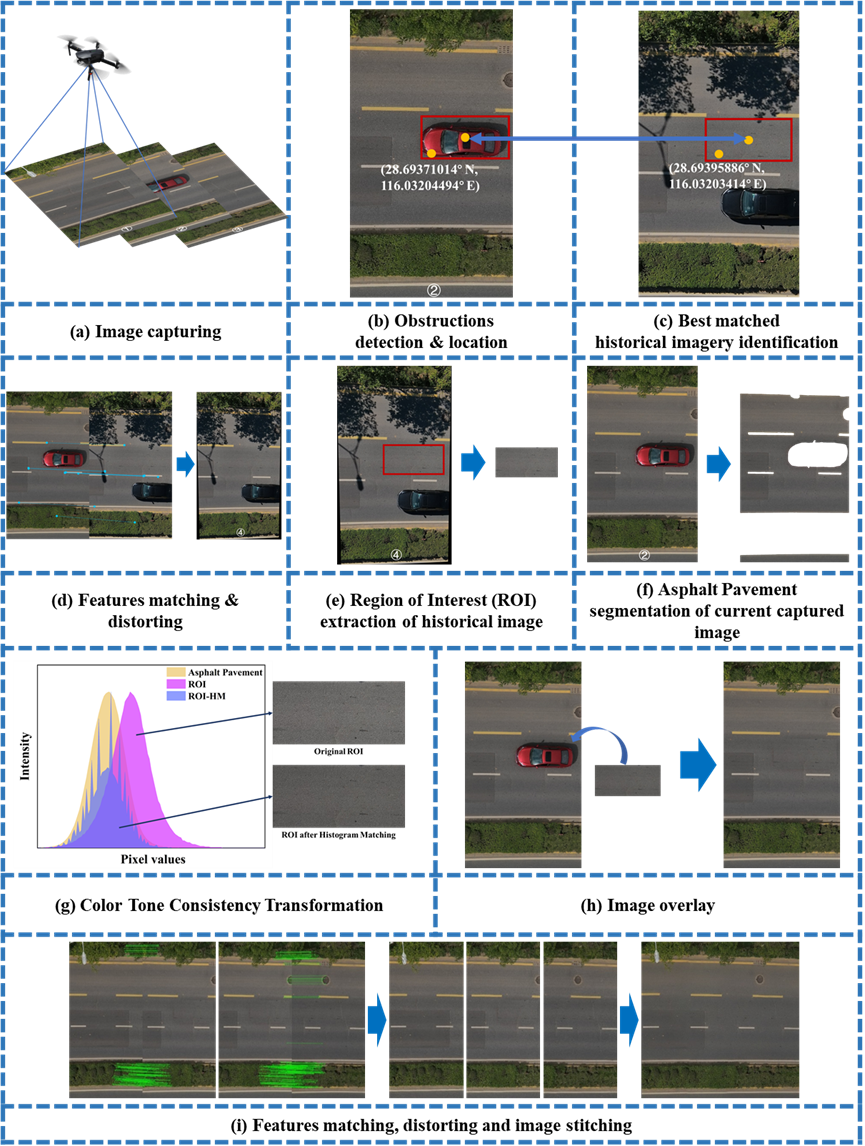
图2.历史最佳匹配图像法
蒋玮教授为论文通讯作者,课题组博士研究生单金焕为论文第一作者,英国利兹大学交通研究所(Institute of Transport Studies)黄跃教授为合作作者。论文链接:https://doi.org/10.1109/TITS.2024.3424525
(撰稿:单金焕 审核:张硕 复核:姚腾坤 终审:肖晶晶)
